All’università di Tokyo non solo hanno prodotto un rivestimento simile alla pelle delle dita, ma anche con funzioni idrorepellenti e di auto-guarigione.
Dagli eroi d’azione agli assassini malvagi, i robot bioibridi fatti di materiali sia viventi che artificiali sono stati al centro di molte fantasie fantascientifiche, ispirando le innovazioni robotiche di oggi.
C’è ancora molta strada da fare prima che robot simili a quelli umani camminino tra noi nella nostra vita quotidiana, ma gli scienziati giapponesi ci stanno portando un passo più vicino creando pelle umana vivente su robot.
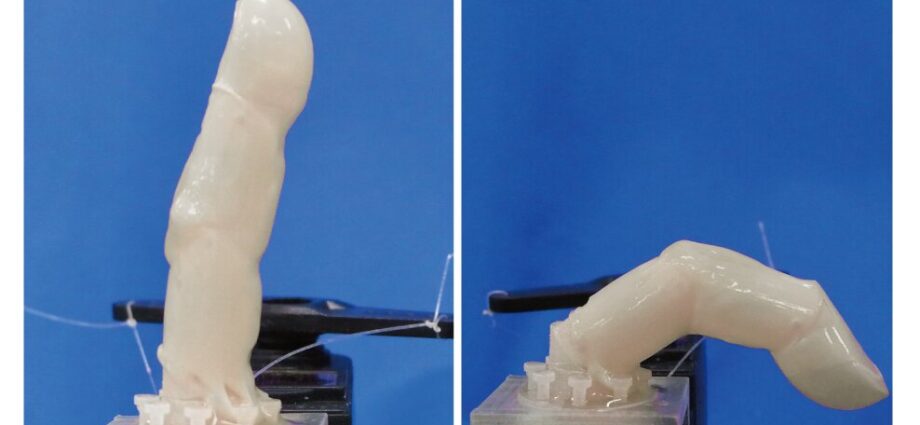
Il metodo sviluppato, presentato il 9 giugno sulla rivista Matter, non solo ha prodotto un rivestimento simile alla pelle delle dita, ma anche con funzioni idrorepellenti e di auto-guarigione.
”Il dito sembra leggermente ‘sudato’ quando estratto dall’ambiente di coltura”, dice il primo autore Shoji Takeuchi, professore all’Università di Tokyo, in Giappone. “Poiché il dito è azionato da un motore elettrico, è anche interessante sentire i suoni di clic del motore in armonia con un dito che sembra proprio quello reale.”
Apparire “reali” come un essere umano è una delle massime priorità per i robot umanoidi che hanno spesso il compito di interagire con gli esseri umani nei settori sanitario e dei servizi. Un aspetto simile a quello umano può migliorare l’efficienza della comunicazione ed evocare simpatia.
Mentre l’attuale pelle in silicone realizzata per i robot può imitare l’aspetto umano, non può riprodurre trame delicate come le rughe e manca di funzioni specifiche della pelle. Anche i tentativi di fabbricare fogli di pelle viva per coprire i robot hanno avuto un successo limitato, poiché è difficile conformarli a oggetti dinamici con superfici irregolari.
Per creare la pelle, il team ha prima immerso il dito robotico in un cilindro riempito con una soluzione di collagene e fibroblasti dermici umani, i due componenti principali che compongono i tessuti connettivi della pelle.
Takeuchi dice che il successo dello studio risiede nella naturale tendenza al restringimento di questa miscela di collagene e fibroblasti, che si è ridotta e strettamente conformata al dito. Come i primer di vernice, questo strato ha fornito una base uniforme per il successivo strato di cellule, i cheratinociti epidermici umani. Queste cellule costituiscono il 90% dello strato più esterno della pelle, conferendo al robot una consistenza simile alla pelle e proprietà di barriera che trattiene l’umidità.
”Siamo sorpresi da quanto bene il tessuto cutaneo si conforma alla superficie del robot”, afferma Takeuchi. “Ma questo lavoro è solo il primo passo verso la creazione di robot ricoperti di pelle viva”.
La pelle sviluppata è molto più debole della pelle naturale e non può sopravvivere a lungo senza un costante apporto di nutrienti.
Takeuchi e il suo team hanno in programma di affrontare questi problemi e incorporare strutture funzionali più sofisticate all’interno della pelle, come neuroni sensoriali, follicoli piliferi, unghie e ghiandole sudoripare.
”Penso che la pelle viva sia la soluzione definitiva per dare ai robot l’aspetto e il tocco delle creature viventi poiché è esattamente lo stesso materiale che copre i corpi degli animali”, afferma Takeuchi.
Immagine: Takeuchi et al.